Here’s another look at SurferBot, a low-cost, vibration-based robot capable of traversing both water and land. SurferBot’s vibration creates asymmetric ripples on the water surface. Because the waves are bigger at the rear of the robot, it gets propelled forward. But there doesn’t have to be water for SurferBot to get around! It’s actually amphibious, moving on both land and water. It can even transition from land to water on its own. (Image and video credit: E. Rhee et al.; research credit: E. Rhee et al.)
Hard materials don’t always work well in robotics. Here, researchers build soft actuators that can bend, curl, and tighten in order to manipulate objects. They begin by injecting liquid elastomer into a tube (Image 1), followed by a bubble of air. Buoyancy makes the air bubble rise within the tube, creating an asymmetric cross-section where the solidified elastomer has a thin shell along one side and a thicker wall along the other (Image 2). When high-pressure air is pumped into the soft tubes, their asymmetric cross-section makes them bend and twist (Image 3). The team found that they can tune the elastomer tubes to form complex shapes good for gripping and flexing — perfect for a soft robot! (Video and image credit: T. Jones et al.; research credit: T. Jones et al.)
This little robot relies on vibration to generate its adhesion. By vibrating its flexible disk, it generates low pressure in the thin air layer between the disk and the surface. The force created is strong in the normal direction — meaning that the robot won’t come off the surface, even when carrying large weights — but relatively weak in the plane of the surface, allowing the robot to move freely. The system does have some disadvantages, though. It requires a relatively smooth surface to work, and the necessary frequency of vibration is around 200 Hz — well inside of human hearing — which makes the robot very noisy. (Image, video, and research credit: W. Weston-Dawkes et al.; via IEEE Spectrum; submitted by Kam-Yung Soh)
Spiderman makes it look easy, but sticking to surfaces with enough force to climb them is a challenge at the human scale. These researchers tackled the problem with a new method of suction. Traditional suction devices are limited by their ability to seal at the edges. Any surface roughness that prevents a perfect seal creates a leak and fighting those leaks to maintain vacuum pressure requires larger and more powerful pumps.
In this work, the researchers essentially eschew a solid sealing mechanism for a liquid one. A fan inside each suction cup creates a spinning ring of water along the seal’s boundary that allows it to conform even to very rough surfaces without losing vacuum pressure. The researchers demonstrate the principle in action with a hexapod wall-climbing robot as well as with human-scale climbing systems.
But don’t plan your web-slinging adventures just yet! As you can see on the concrete wall example, the system leaks a lot of water, especially when disengaging the suction. Right now, you can only climb as far as your water supply allows. (Image and research credit: K. Shi and X. Li; via Spectrum; submitted by Kam-Yung Soh)
For 3D printers to reach their potential, they need to handle more than one material and be able to swap quickly and seamlessly between them. That’s a tall order given how different materials like silicone and wax are. But a new 3D printer tackles that challenge using microfluidic nozzles designed extrude multiple fluids in quick succession.
The nozzle controls which fluid it ejects by pressurizing individual fluids, allowing it to switch from one to another up to 50 times a second (first image). Multiple nozzles, each containing multiple fluids, can be used to print periodically-patterned designed more quickly than previously possible (second image). The system can even directly print air-powered robots with both soft and hard components (third image). (Image and video credit: Nature, with M. Skylar-Scott et al.; research credit: M. Skylar-Scott et al.; via Nature; submitted by Kam-Yung Soh)
The latest FYFD/JFM video is out! May brings us a look at the incredible flight of dandelion seeds, numerical simulations that reveal the flow above forest canopies, and a look at bee-inspired flapping wing robots being developed for exploring Mars! Learn about all this in the video below, and, if you’ve missed other videos in the series, you can catch up here. (Image and video credit: N. Sharp and T. Crawford)
It’s time for another JFM/FYFD collab video! April’s video brings us a taste of spring with research on how bees carry pollen, squid-inspired robotics, and understanding the physics of underwater plumes like the one that occurred in the Deepwater Horizons spill eight years ago. Check it all out in the video below. (Image and video credit: T. Crawford and N. Sharp)
Drop some hydrogel beads in a hot frying pan and they’ll bounce, hiss, and screech. Normally, if you drop a ball, it bounces to ever smaller heights until it comes to rest. In contrast, on a hot surface the hydrogel can bounce to a steady height for minutes at a time, raising a question: where does it get the energy for its incessant bounce?
Upon close examination of the impact, researchers found the hydrogel beads are actually slapping the surface over and over on each bounce. The frequency of the slapping exactly matches that of the audible screech, so what you’re actually hearing is this bounce-slap. Now what causes the slapping?
Contact with the hot surface vaporizes some of the water inside the hydrogel. If it were a droplet, this vapor would form a thin, almost frictionless layer the droplet could glide on; that’s the classic Leidenfrost effect. Here the shell of the bead prevents that until the pressure really builds up. When the pressure gets high enough, the vapor finally escapes, opening up a gap. As the gap reaches its largest point, the bead rebounds elastically, bringing it back in contact with the surface and starting the process again. Each of these cycles acts like a tiny engine, harvesting energy that drives the larger bounce. This elastic Leidenfrost effect may be particularly helpful in soft robotics, providing robots with a new mechanism for movement. (Image and video credit: S. Waitukaitis et al.,arXiv)
A research group at MIT has created a new class of fast-acting, soft robots from hydrogels. The robots are activated by pumping water in or out of hollow, interlocking chambers; depending on the configuration, this can curl or stretch parts of the robot. The hydrogel bots can move quickly enough to catch and release a live fish without harming it. (Which is a feat of speed I can’t even manage.) Because hydrogels are polymer gels consisting primarily of water, the robots could be especially helpful in biomedical applications, where their components may be less likely to be rejected by the body. For more, see MIT News or the original paper. (Image credit: H. Yuk/MIT News, source; research credit: H. Yuk et al.)
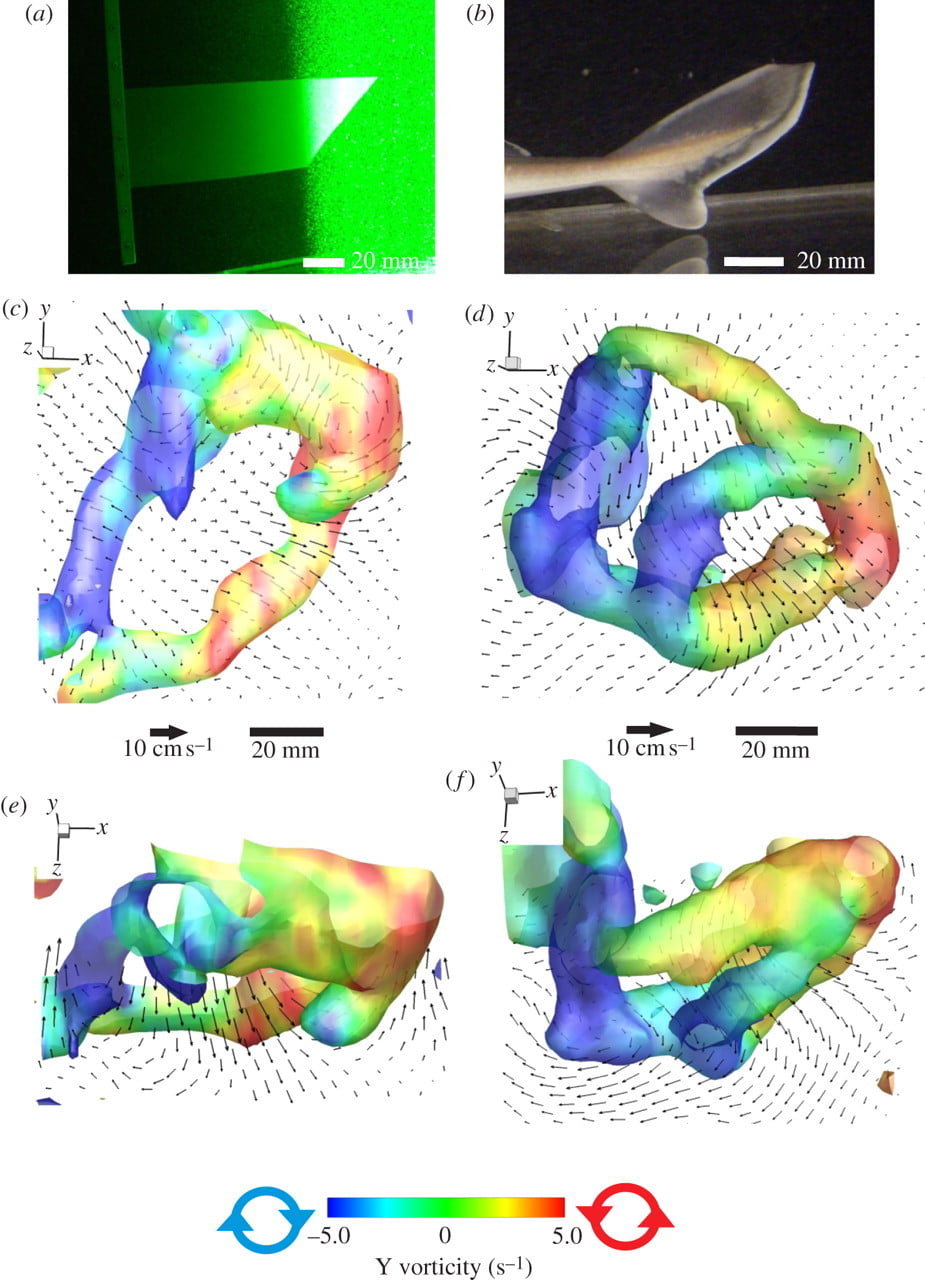
Volumetric imaging of swimming spiny dogfish, a type of shark, shows that their distinctively asymmetric tails produce a set of dual-linked vortex rings with every half beat of their tail. The figure above shows data from the actual shark on the right (b,d,f) and a similarly shaped robotic tail on the left (a,c,e). The second row contains lateral views (c,d) and the bottom row contains dorsal views (e,f) of the vorticity isosurfaces measured. The robotic tail does not demonstrate the same double vortex structure, leading scientists to suspect that the shark may be actively stiffening its tail mid-stroke to control its wake. The finding could help engineers design aquatic robots whose morphing fins help it swim more efficiently. For more, see Wired.